
Wadim Kehl, Ph.D.
Heya! I'm the Director of AD/ADAS Perception at Woven by Toyota, contributing to the safety foundation of all Toyota and Lexus cars. In the past, I helped shipping systems such as Teammate Advanced Drive and Toyota/Lexus Safety Sense (TSS/LSS), improving traffic safety for millions of people around the world. Formerly, I've been at the amazing Toyota Research Institute, working on a wide range of vision-related research for cars and robots. I did my Master's and PhD studies at TUM, and my Bachelor's at University of Bonn, working with great minds such as Nassir Navab, Slobodan Ilic, Federico Tombari, Volker Steinhage and Jens Behley. Reviewer for CVPR, ICCV, ECCV, TPAMI, IJCV, ICML, ACCV, IROS, AAAI.
News
- New CVPR 2023 paper on compositional temporal grounding!
- New paper at ECCV 2022: photo-realistic rendering through neural networks for natural domain randomization!
- Accepted paper to CoRL2021 exploring single-shot 3D scene reconstruction with learned priors!
- Two new articles out: ECCV2020 paper on autolabeling and a survey on differentiable rendering!
- Finally achieved my oral hat-trick at the Big 3 (CVPR, ICCV, ECCV) as (co-)first author! :)
- New work on 3D autolabeling with differentiable rendering is out. Accepted for oral presentation at CVPR 2020!
- New paper 'DeceptionNet: Network-Driven Domain Randomization' accepted to ICCV 2019!
- Our new ROI-10D paper is out on arXiv. Accepted to CVPR 2019!
- Our paper "Deep Model-Based 6D Pose Refinement in RGB" was selected as an oral presentation at ECCV'18 in Munich, Germany.
- The detection code for our ICCV'17 paper can be found here
- Our paper "SSD-6D: Making RGB-Based 3D Detection and 6D Pose Estimation Great Again" was selected as an oral presentation at ICCV'17 in Venice, Italy.
- Our ECCV'16 paper "Deep Learning of Local RGB-D Patches for 3D Object Detection and 6D Pose Estimation" was awarded 'Best Poster' as a co-submission to the 2nd 6D Pose Recovery Workshop .
Publications (not listing the boring patents here...)
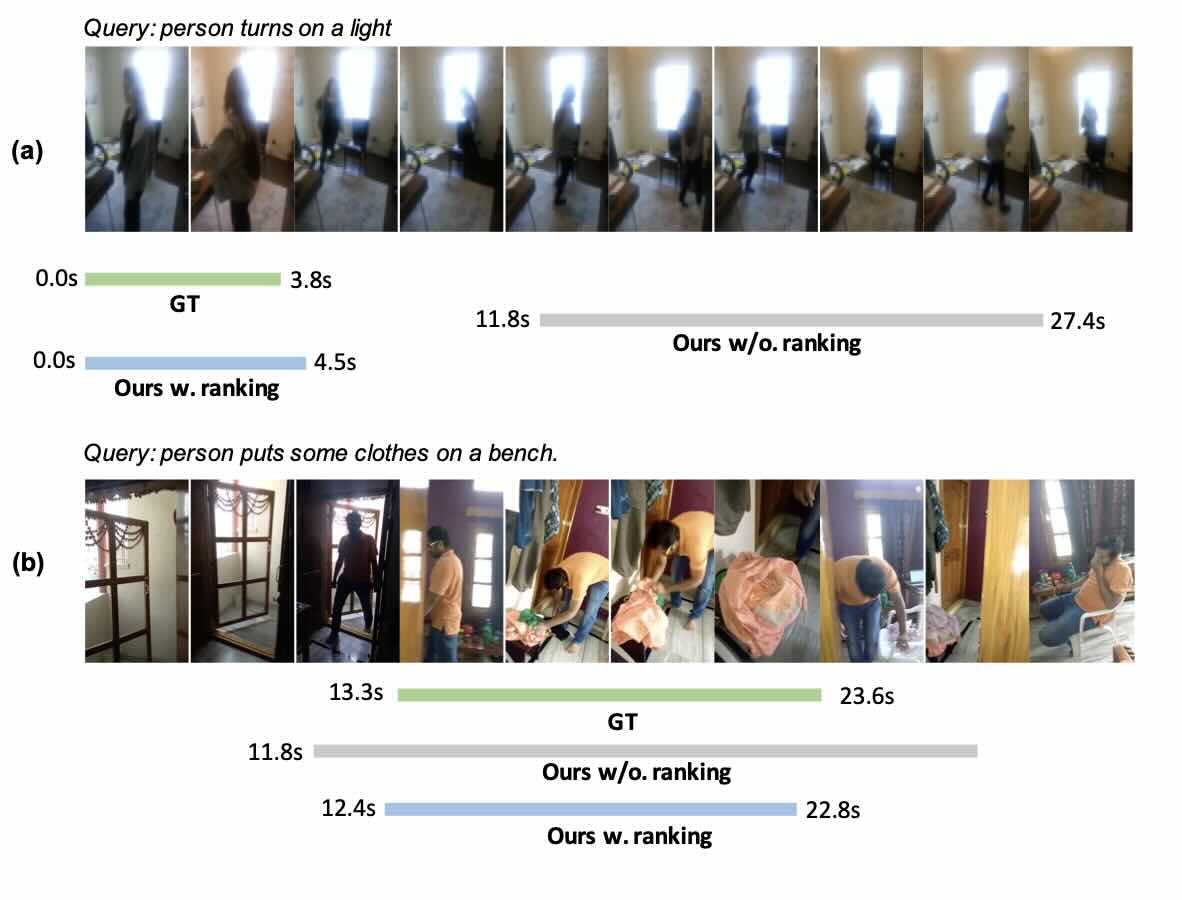 DeCo: Decomposition and Reconstruction for Compositional Temporal Grounding via Coarse-To-Fine
Contrastive Ranking.
DeCo: Decomposition and Reconstruction for Compositional Temporal Grounding via Coarse-To-Fine
Contrastive Ranking.
Lijin Yang, Quan Kong, Hsuan-Kung Yang, Wadim Kehl, Yoichi Sato, Norimasa Kobori. CVPR 2023.
Paper
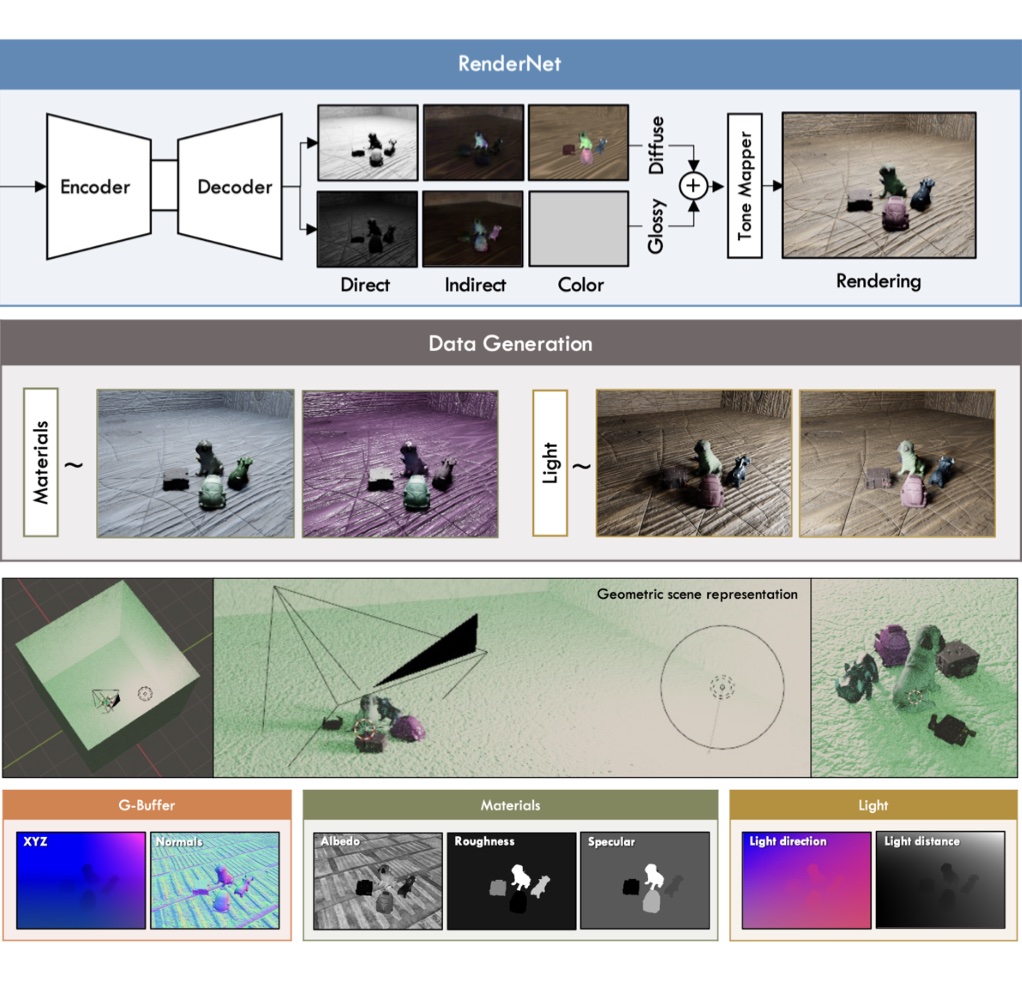 Photo-realistic Neural Domain Randomization.
Photo-realistic Neural Domain Randomization.
Sergey Zakharov, Rares Andrei Ambrus, Vitor Campagnolo Guizilini, Wadim Kehl, Adrien Gaidon. ECCV 2022.
Paper
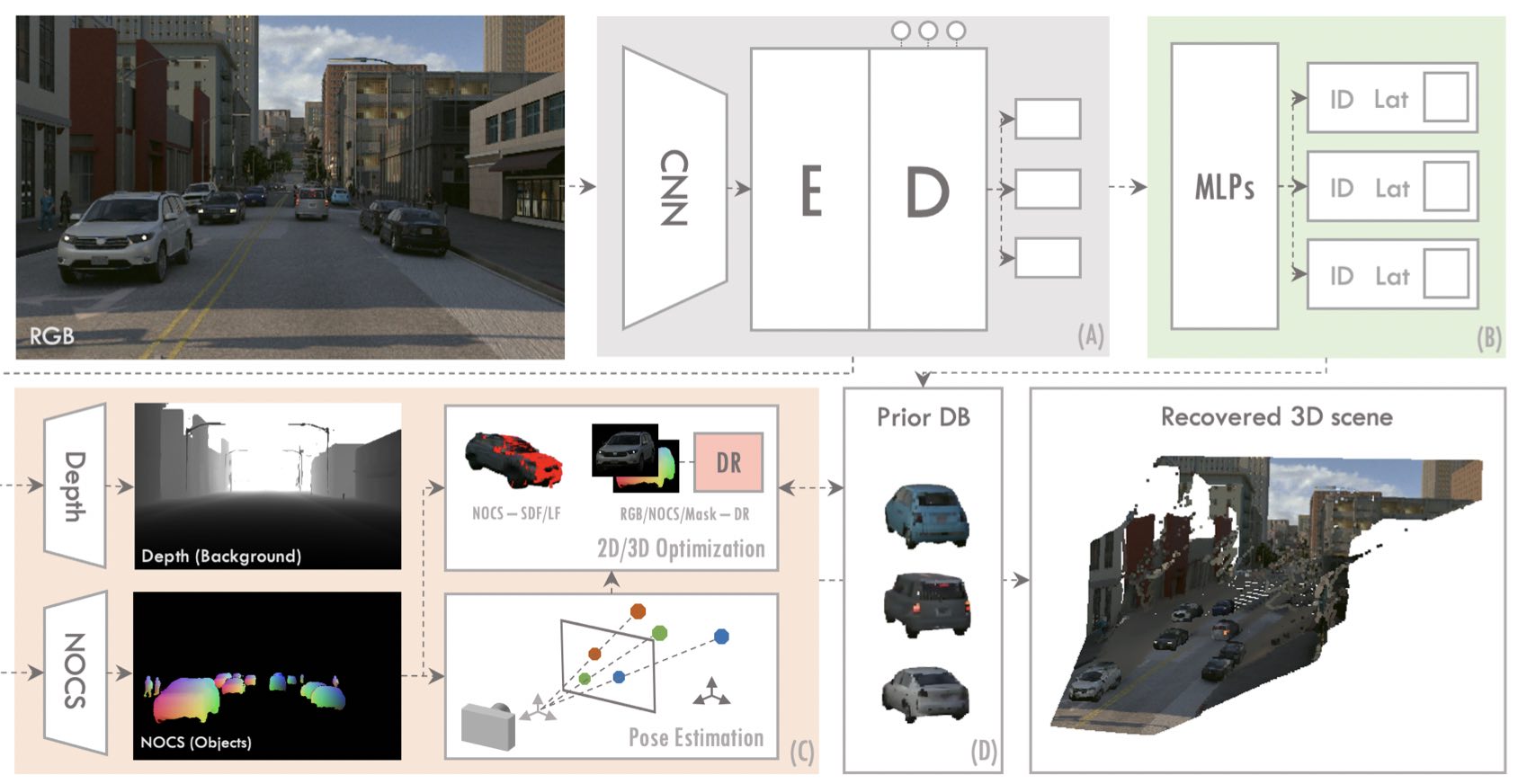 Single-Shot Scene Reconstruction.
Single-Shot Scene Reconstruction.
Sergey Zakharov, Rares Andrei Ambrus, Dennis Park, Vitor Campagnolo Guizilini, Wadim Kehl, Fredo Durand, Joshua B. Tenenbaum, Vincent Sitzmann, Jiajun Wu, Adrien Gaidon. CoRL 2021.
Paper
 Monocular Differentiable Rendering for Self-Supervised 3D Object Detection.
Monocular Differentiable Rendering for Self-Supervised 3D Object Detection.
Deniz Beker, Hiroharu Kato, Mihai Adrian Morariu, Takahiro Ando, Toru Matsuoka, Wadim Kehl, Adrien Gaidon. ECCV 2020.
Paper
 Differentiable Rendering: A Survey.
Differentiable Rendering: A Survey.
Hiroharu Kato, Deniz Beker, Mihai Morariu, Takahiro Ando, Toru Matsuoka, Wadim Kehl, Adrien Gaidon. arXiv 2020.
Paper
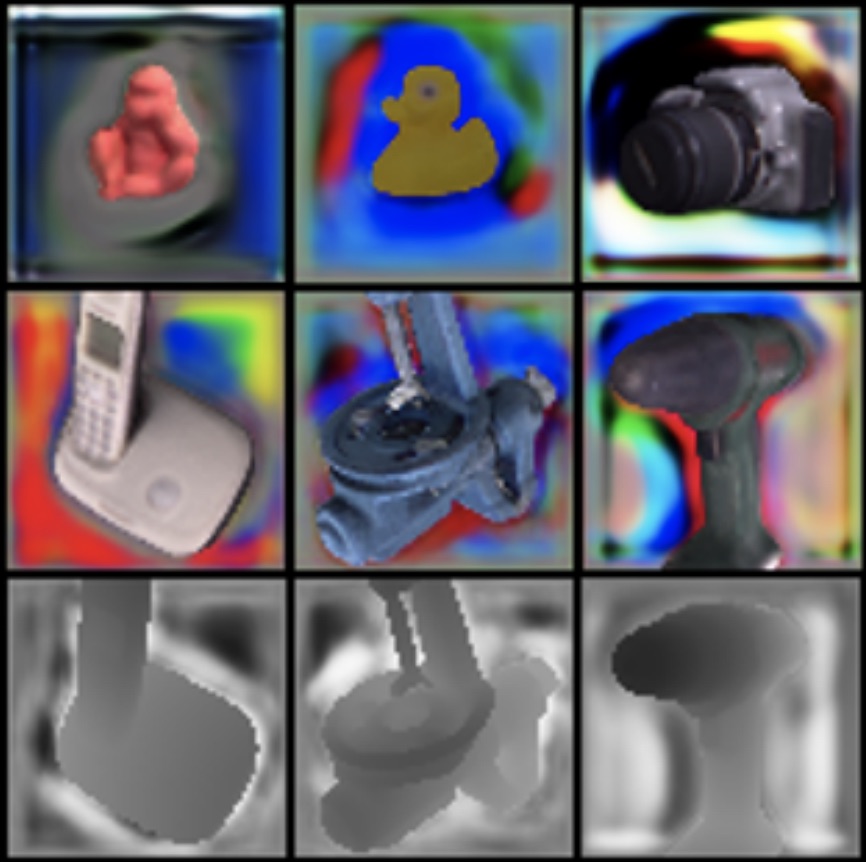
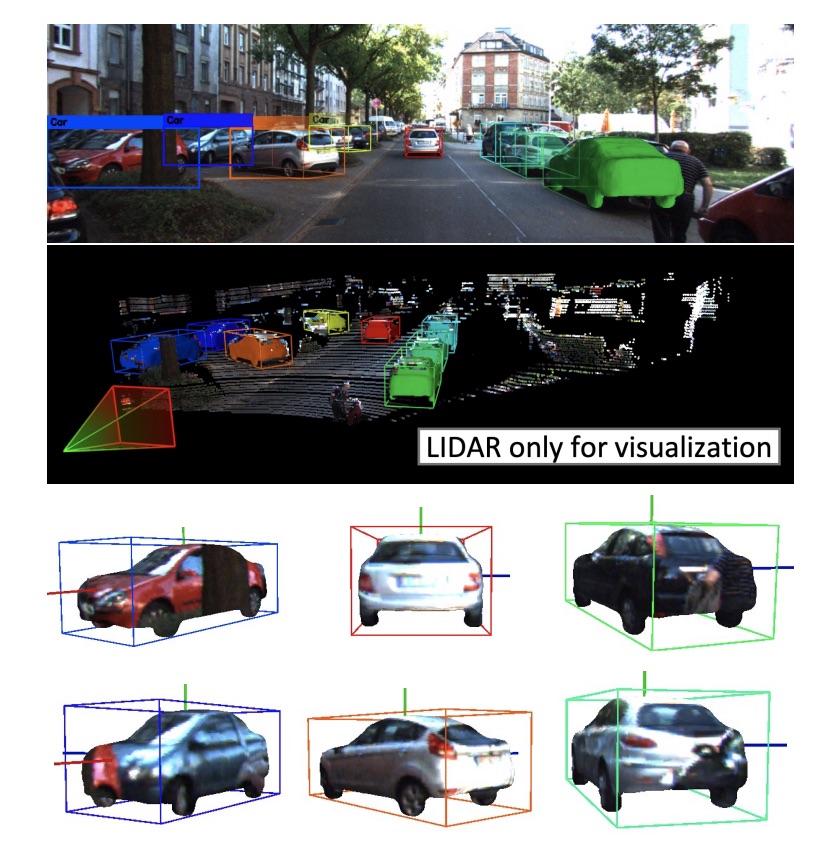
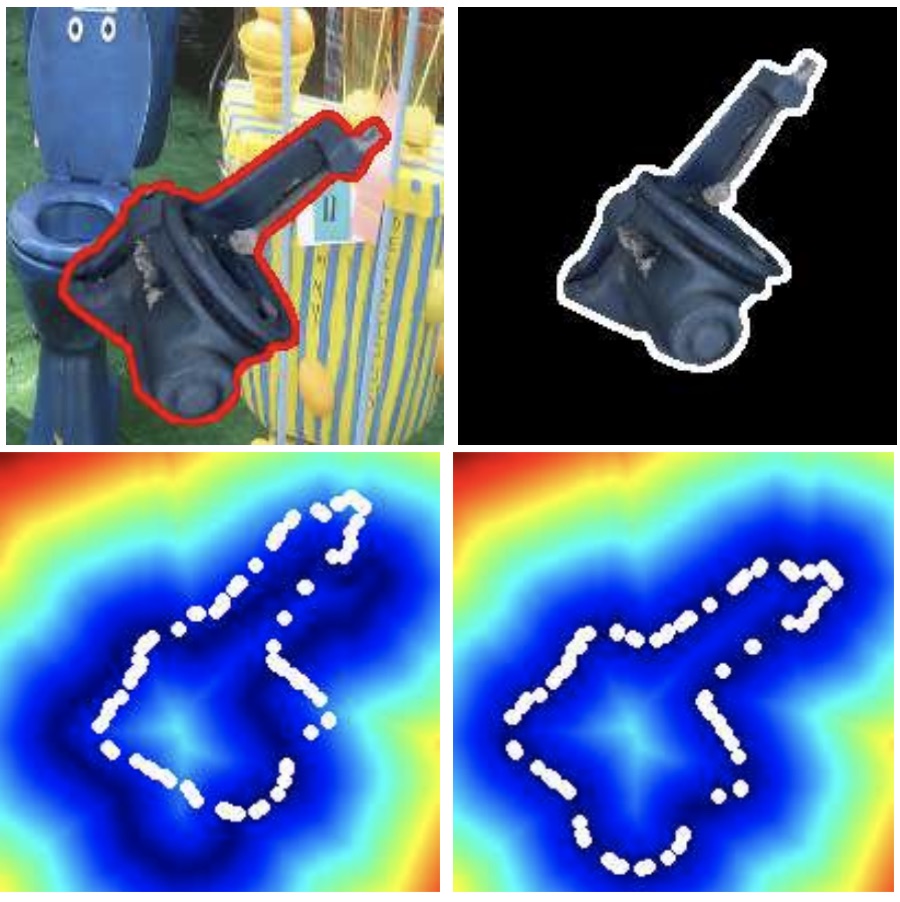
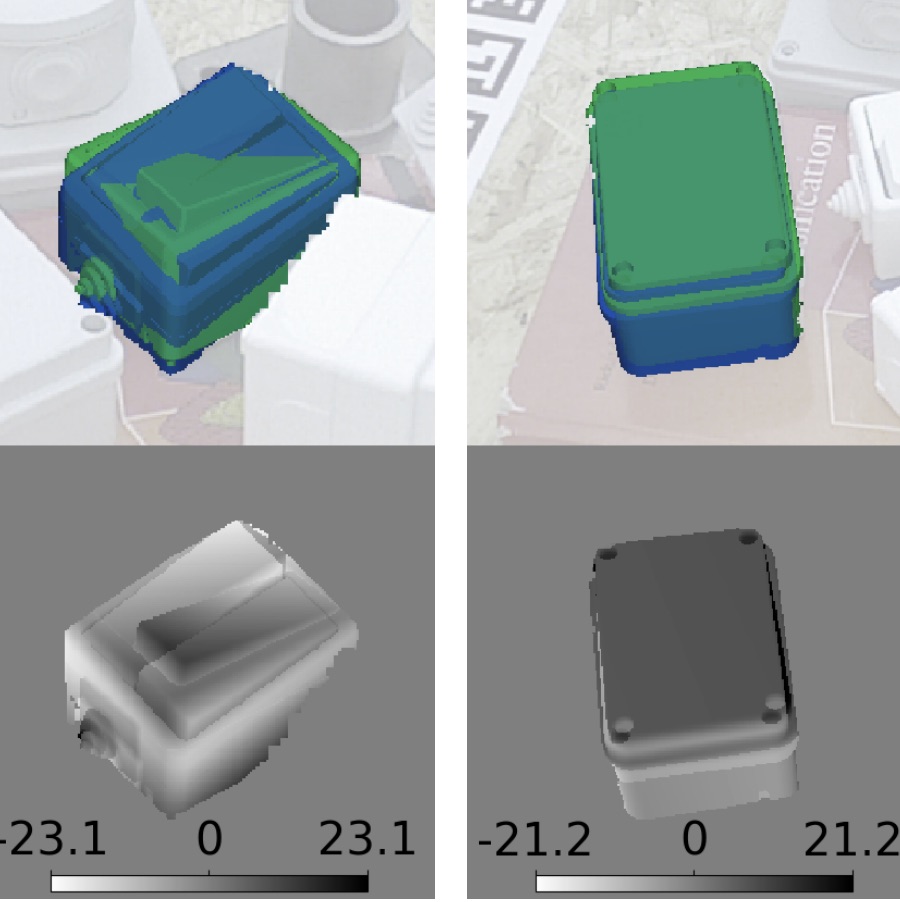
 (ORAL) Autolabeling 3D Objects with Differentiable Rendering of SDF Shape Priors.
(ORAL) Autolabeling 3D Objects with Differentiable Rendering of SDF Shape Priors.
Sergey Zakharov*, Wadim Kehl*, Arjun Bhargava, Adrien Gaidon. CVPR 2020.
Paper Video
 DeceptionNet: Network-Driven Domain Randomization.
DeceptionNet: Network-Driven Domain Randomization.
Sergey Zakharov, Wadim Kehl, Slobodan Ilic. ICCV 2019.
Paper
 ROI-10D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape.
ROI-10D: Monocular Lifting of 2D Detection to 6D Pose and Metric Shape.
Fabian Manhardt*, Wadim Kehl*, Adrien Gaidon. CVPR 2019.
Paper Video
 (ORAL) Deep Model-Based 6D Pose Refinement in RGB.
(ORAL) Deep Model-Based 6D Pose Refinement in RGB.
Fabian Manhardt*, Wadim Kehl*, Nassir Navab, Federico Tombari. ECCV 2018.
Paper Video Oral Code
 BOP: Benchmark for 6D Object Pose Estimation.
BOP: Benchmark for 6D Object Pose Estimation.
Tomas Hodan, Frank Michel, Eric Brachmann, Wadim Kehl, Anders Buch, Dirk Kraft, Bertram Drost, Joel Vidal, Stephan Ihrke, Xenophon Zabulis, Caner Sahin, Fabian Manhardt, Federico Tombari, Tae-Kyun Kim, Jiri Matas, Carsten Rother. ECCV 2018.
Paper
 (ORAL) SSD-6D: Making RGB-Based 3D Detection and 6D Pose Estimation Great Again.
(ORAL) SSD-6D: Making RGB-Based 3D Detection and 6D Pose Estimation Great Again.
Wadim Kehl*, Fabian Manhardt*, Federico Tombari, Slobodan Ilic, Nassir Navab. ICCV 2017.
Paper Video Oral Code
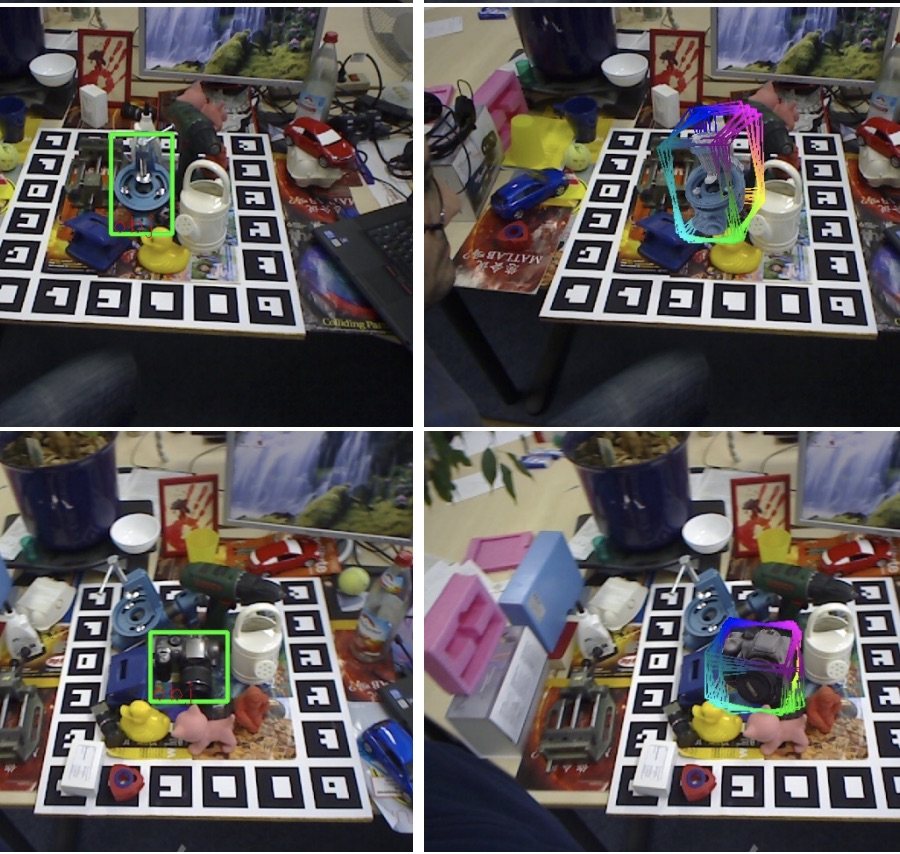
Wadim Kehl, Federico Tombari, Slobodan Ilic, Nassir Navab. CVPR 2017.
Paper Video
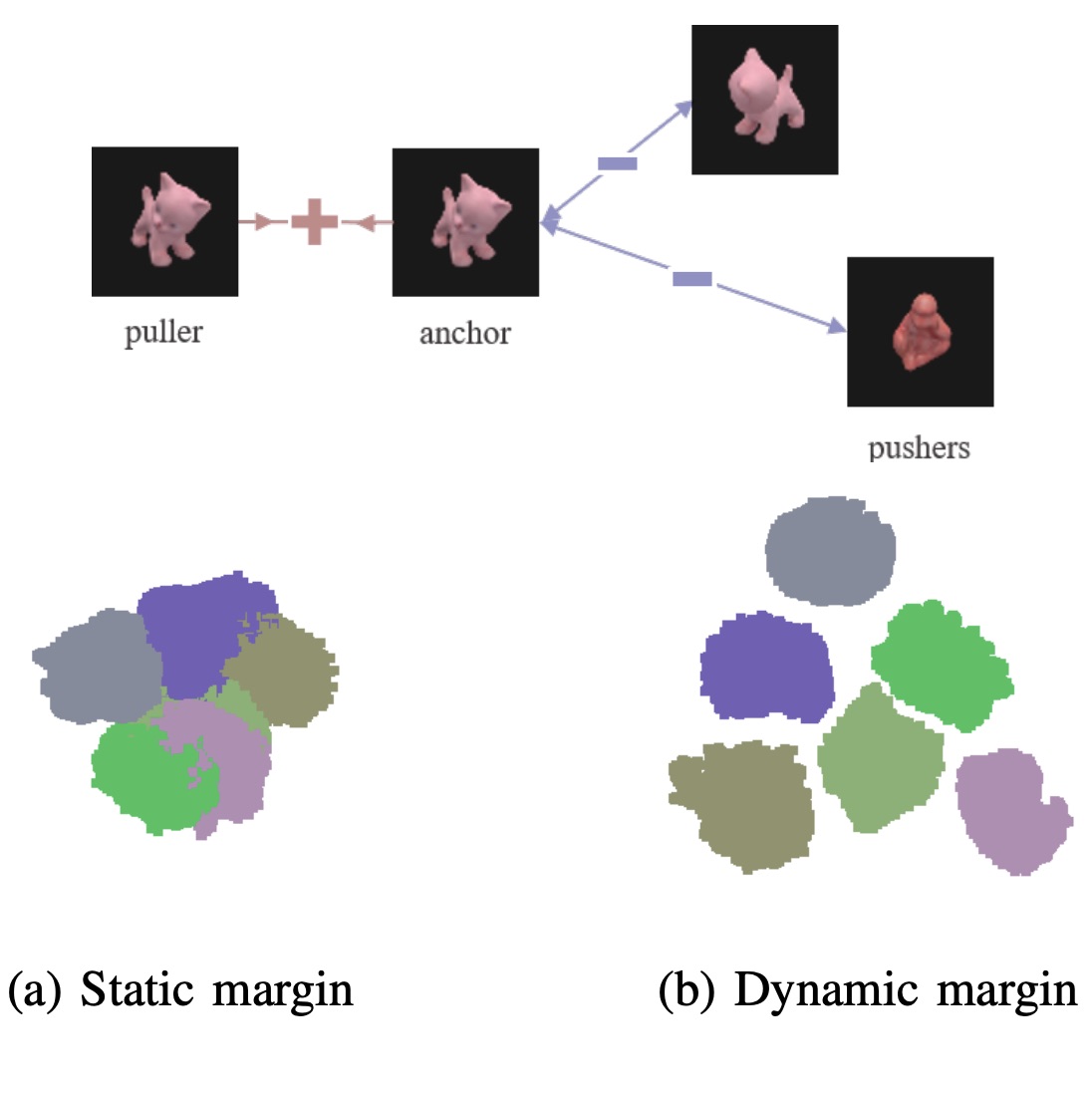 3D Object Instance Recognition and Pose Estimation Using Triplet Loss with Dynamic Margin.
3D Object Instance Recognition and Pose Estimation Using Triplet Loss with Dynamic Margin.
Sergey Zakharov, Wadim Kehl, Benjamin Planche, Andreas Hutter, Slobodan Ilic. IROS 2017.
Paper
 Improving Optical Myography via Convolutional Neural Networks.
Improving Optical Myography via Convolutional Neural Networks.
Christian Nissler, Imran Badshah, Claudio Castellini, Wadim Kehl, Nassir Navab. MEC 2017.
Paper
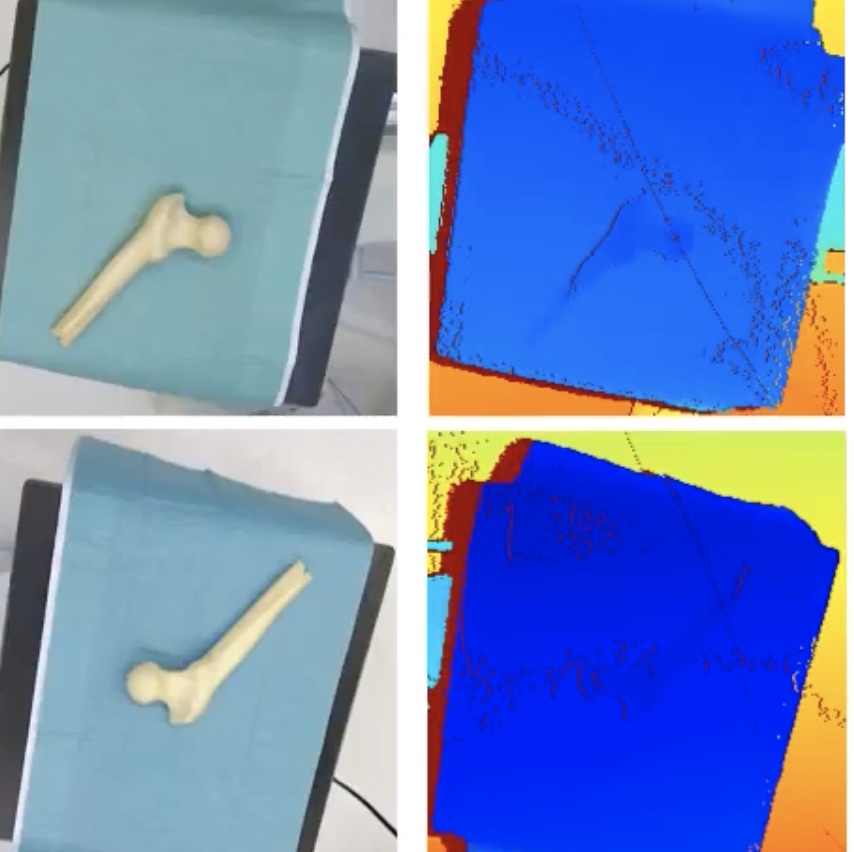
 SDF-2-SDF Registration for Real-time 3D Reconstruction from RGB-D Data.
SDF-2-SDF Registration for Real-time 3D Reconstruction from RGB-D Data.
Miroslava Slavcheva, Wadim Kehl, Nassir Navab, Slobodan Ilic. IJCV 2017.
Paper Video
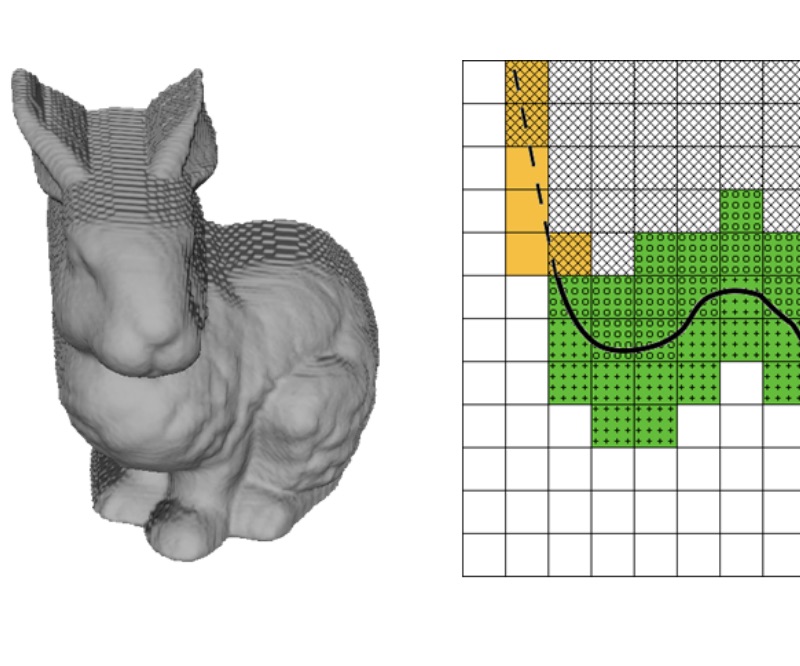
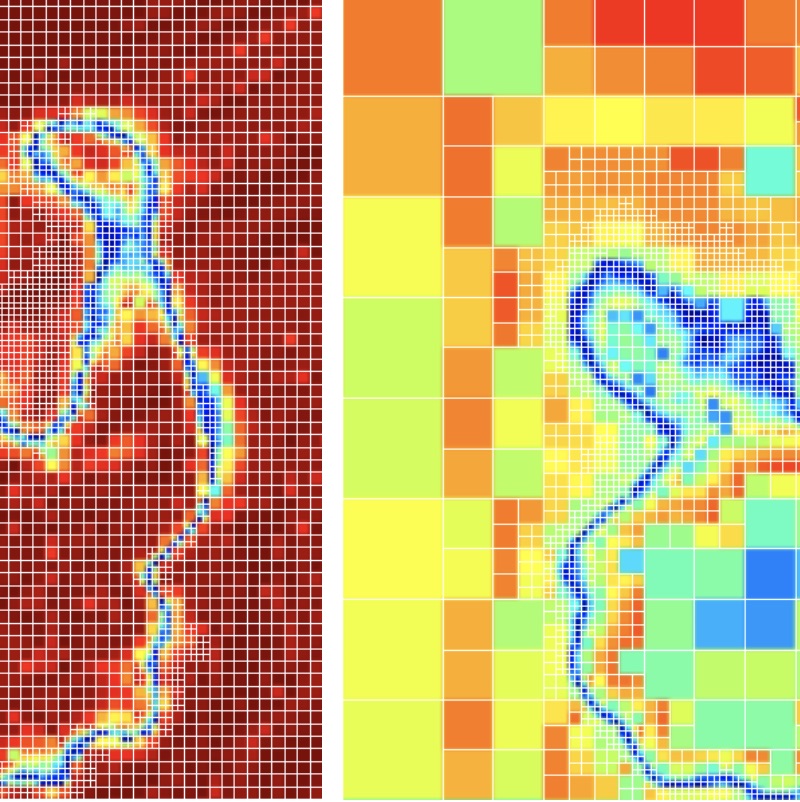 An Octree-Based Approach towards Efficient Variational Range Data Fusion.
An Octree-Based Approach towards Efficient Variational Range Data Fusion.
Wadim Kehl, Tobias Holl, Federico Tombari, Slobodan Ilic, Nassir Navab. BMVC 2016.
Paper
 (BEST POSTER) Deep Learning of Local RGB-D Patches for 3D Object Detection and 6D Pose
Estimation.
(BEST POSTER) Deep Learning of Local RGB-D Patches for 3D Object Detection and 6D Pose
Estimation.
Wadim Kehl, Fausto Milletari, Federico Tombari, Slobodan Ilic, Nassir Navab. ECCV 2016.
Paper Video
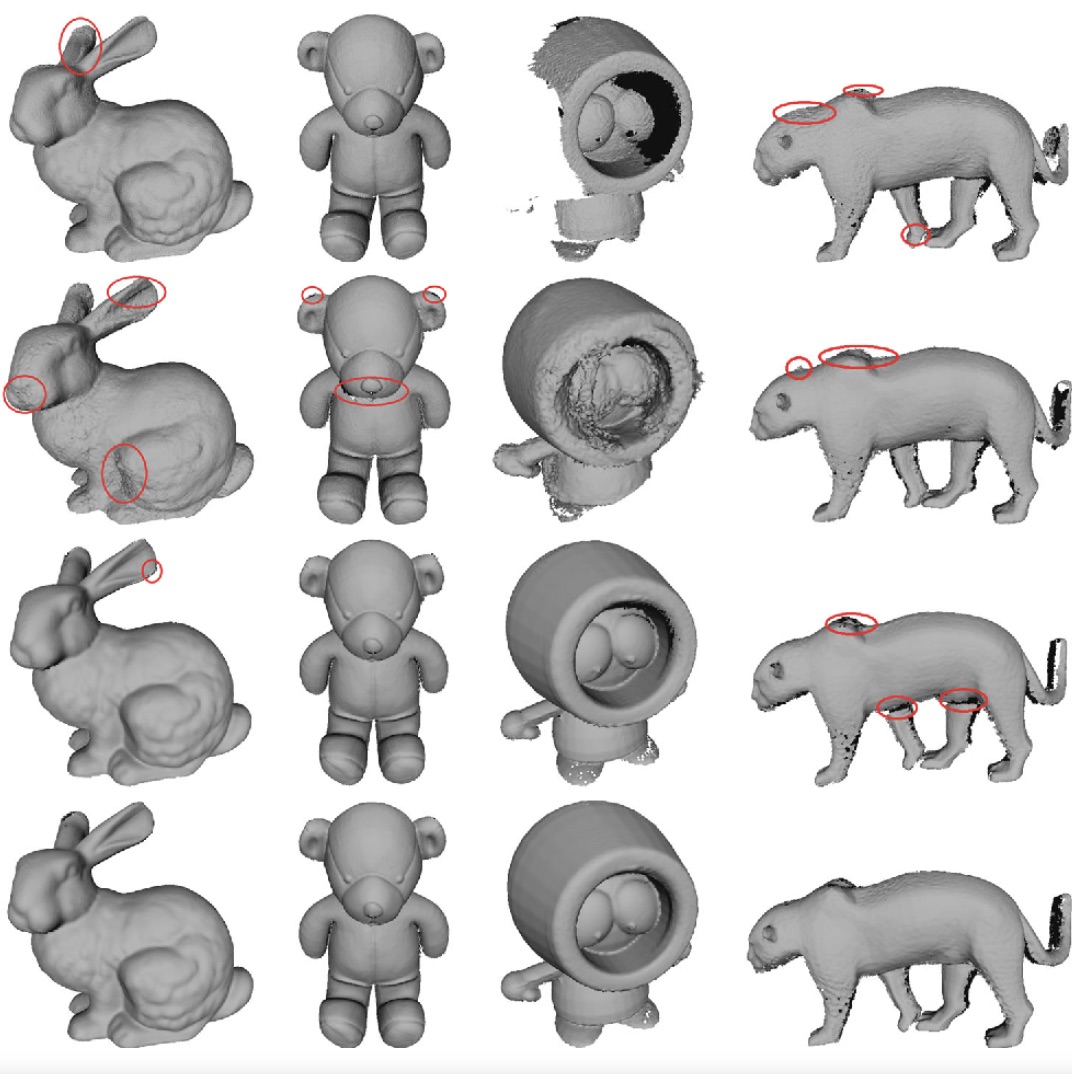
 SDF-2-SDF: Highly Accurate 3D Object Reconstruction.
SDF-2-SDF: Highly Accurate 3D Object Reconstruction.
Miroslava Slavcheva, Wadim Kehl, Nassir Navab, Slobodan Ilic. ECCV 2016.
Paper Video
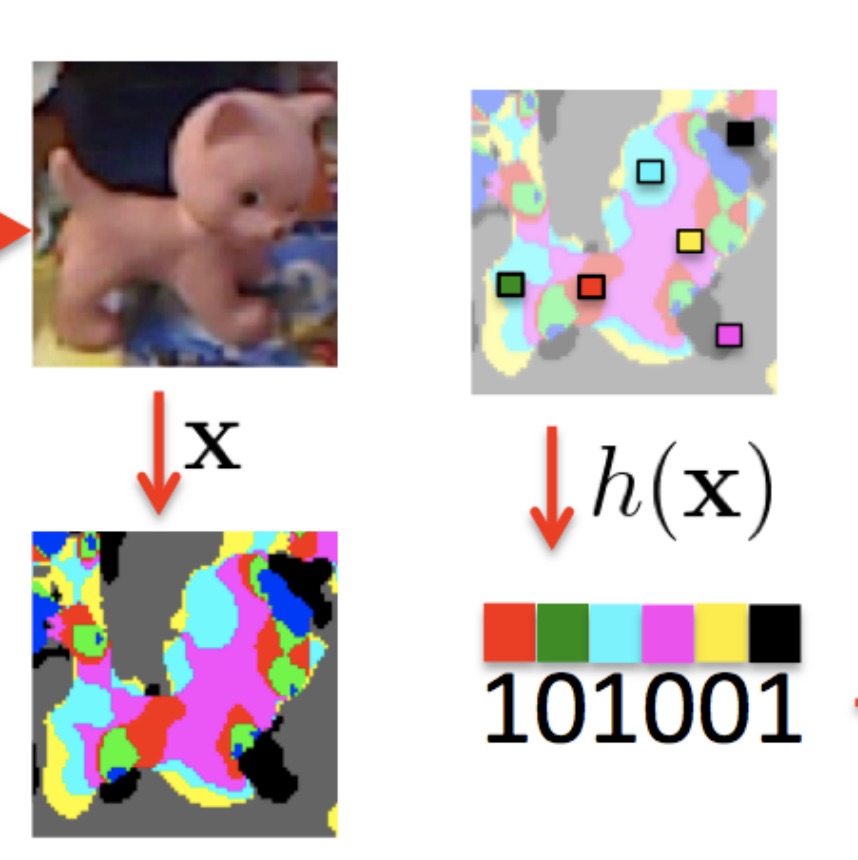 Hashmod: A Hashing Method for Scalable 3D Object Detection.
Hashmod: A Hashing Method for Scalable 3D Object Detection.
Wadim Kehl, Federico Tombari, Nassir Navab, Slobodan Ilic, Vincent Lepetit. BMVC 2015.
Paper
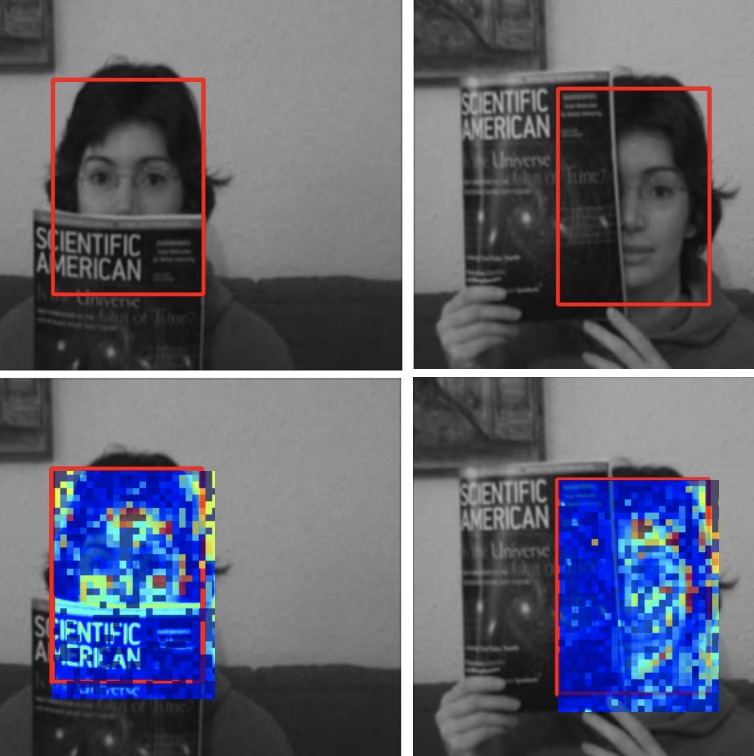 Universal Hough dictionaries for object tracking.
Universal Hough dictionaries for object tracking.
Fausto Milletari, Wadim Kehl, Federico Tombari, Slobodan Ilic, Ahmad Ahmadi, Nassir Navab. BMVC 2015.
Paper
 Augmenting mobile C-arm fluoroscopes via Stereo-RGBD sensors for multimodal
visualization.
Augmenting mobile C-arm fluoroscopes via Stereo-RGBD sensors for multimodal
visualization.
Severine Habert, Ma Meng, Wadim Kehl, Xiang Wang, Federico Tombari, Pascal Fallavolita, Nassir Navab. ISMAR 2015.
Paper Video
 Coloured signed distance fields for full 3D object reconstruction.
Coloured signed distance fields for full 3D object reconstruction.
Wadim Kehl, Nassir Navab, Slobodan Ilic. BMVC 2014.
Paper